无人艇远距离通信
(unmanned surface.vessel,简称USV),是一种无人操作的水面舰艇。主要用于执行危险以及不适于有人船只执行的任务。一旦配备先进的控制系统、传感器系统、通信系统和武器系统后,可以执行多种战争和非战争军事任务,比如侦察、搜索、探测和排雷;搜救、导航和水文地理勘察;反潜作战、反特种作战以及巡逻、打击海盗、反恐攻击等。近年来,各国都十分重视对于无人艇的研究,其中,在无人水面艇研发和使用领域,早期美国和以色列一直处于领先地位。
无人艇现状
美国海军从上世纪90年代开始研究无人水面艇。2007年,美国海军发布《海军无人水面艇主计划》,为无人水面艇赋予了7项任务,同时还界定了无人水面艇的船型、尺寸和标准等要素,这标志着美国无人水面艇走上正规发展阶段。美国研制的典型的无人艇有“斯巴达侦察兵”(Spartan Scout)、“幽灵卫士”(Ghost Guard)、“水虎鱼”等。日前,美国海底科技公司在2013年法国国际军警设备展览会上展示了用于内河、港口水域监视侦察的新型无人水面艇CAT.Surveyo,CAT.Surveyo无人水面艇采用双体船型,有远程操控和自主导航模式,还配有小型遥控潜水器,如该公司的“Observer”型号,配有高清摄像头并可选配用于浑浊水域的成像声纳。陆上指挥站可使用WiFi连接对艇上所有的嵌入式软件进行可视化实时控制以色列研制的世界上第一代实战操作的“保护者”无人艇被认为是当今最为成熟的无人水面艇。该艇已经开始批量生产,并装备部队,新加坡海军是它第一个海外用户。2014年2月以色列航空航天工业公司推出名为“KATANA”的新一代无人水面艇该无人艇包括自动导航和自动防撞系统,并装配有电光和红外相机、视距和非视距通信、雷达和武器系统等。能在保护专属经济区、海上边界等大范围内执行多种任务,通过对远近目标进行辨别、追踪和分类,提供实时情报图像,并根据指令对目标发动进攻,可全自动操作,也可由人遥控操作。
近年我国已陆续有民营公司进入的军用无人艇模型和民用无人艇领域。2015 年在深圳国际高新技术交流会上,某院校展示了新型无人艇,该艇可配备雷达、声纳、摄像头等采集附近环境信息,还可以根据需要装备轻便的武器系统,并且可以利用卫星及Anykey-AV8专网无线通信技术进行远距离遥控,执行海面巡航、搜救以及海上反潜任务等。

上图为装配了Anykey-AV8无线多载波宽带电台的无人艇。传输距离40KM,带宽20Mbps。
2008年青岛奥帆赛期间,中国航空科工集团和中国气象局大气探测技术中心共同研发的“天象一号”完成了指定区域风向、风速、水温、气温等多项环境参数测量任务。
无人艇通信
早期通信主要依靠数传电台、WIFI等较为落后的通信方式。数传电台传输速率低,保密性差,不具备抗干扰性,抗多径衰落,镜面放射等特性,存在误码率高,距离近等缺点。WiFi速率高,但通信距离近,不具备实用意义。
水面无线通信的特点
无线电波在水面的通信特性和在陆地上有很大区别,通信具有自己的环境特点:首先,在地形上,海上障碍物遮挡比较少,这样导致的直接结果就是电波传播余隙大.所以电波在海上传播时,绕射损耗比陆地上小。同时,传播 余隙增大,增加了电波反射,并且电磁波在水面传播时,如果掠射角很小,反射系数就比较大,这样反射波的影响也比在陆地上大。当存在更多障碍物时,电波将会被阻挡。所以经常考虑的是遇到主障碍是孤立的情况,在海面上对应的主要是天气恶劣时所引起的海浪所造成的单刃峰绕射或是在船与船之间存在岛屿间隔时所造成的单元弧形绕射,地球是个球体,所以在地面上和水面上都不是平面,因此电波通过水面的反射,实际上是光滑球面对电波的反射。也称之为无线电波的镜面反射效应。
另外水面上的高湿,高雾环境还存在的大气吸收衰减,云雾衰减,以及雨衰。这些衰减可以在系统设计当中通过增加功率冗余来抵消,针对于无人艇无线通信的挑战是无线电波的多径干扰。因为无人艇天线高度一般不高,贴近水面,发射的无线电波通过海浪、岛屿、船舶障碍物之间,其接收信号的强度,将由各直射波和反射波叠加合成。多径效应会引起信号衰落。各条路径的电长度会随时间而变化,故到达接收点的各分量场之间的相位关系也是随时间而变化的。这些分量场的随机干涉,形成总的接收场的衰落。各分量之间的相位关系对不同的频率是不同的。因此,它们的干涉效果也因频率而异,这种特性称为频率选择性。在宽带信号传输中,频率选择性可能表现明显,形成交调。与此相应,由于不同路径有不同时延,同一时刻发出的信号因分别沿着不同路径而在接收点前后散开,而窄脉冲信号则前后重叠。这种重叠造成数据无法解析,所以传统的单载波电台在多径环境中几乎无法正常工作。
Anykey-AV8核心技术是正交频分复用技术即(ofdm/cofdm)Orthogonal Frequency Division Multiplexing,ofdm/cofdm将信道分成若干正交子信道,将高速数据信号转换成并行的低速子数据流,调制到在每个子信道上进行传输。正交信号可以通过在接收端采用相关技术来分开,这样可以减少子信道之间的相互干扰(ISI) 。每个子信道上的信号带宽小于信道的相关带宽,因此每个子信道上可以看成平坦性衰落,从而可以消除码间串扰,而且由于每个子信道的带宽仅仅是原信道带宽的一小部分,信道均衡变得相对容易。
OFDM技术是HPA联盟(HomePlug Powerline Alliance)工业规范的基础,它采用一种不连续的多音调技术,将被称为载波的不同频率中的大量信号合并成单一的信号,从而完成信号传送。由于这种技术具有在杂波干扰下传送信号的能力,因此常常会被利用在容易受外界干扰或者抵抗外界干扰能力较差的传输介质中。传输中的数据流分成多个部分,把无线信道分成N个信道,而传输的数据流则是分成N条数据,在N个信道上分别传输。虽然总的信道是不平坦的,具有频率选择性,但是每个信道在自己的信道上传输,解决了平坦性。这样不仅有利于增大在传输过程中的符号的周期时间,还可以减少码间的干扰。重要的一点是,加入了保护间隔,可以消除符号间干扰。
OFDM是一种特殊的多载波调制技术,传输的信息通过串并转换,在多个子信道上传输,不像传统的调制在一个时刻只能传输一个频率的信号,OFDM可以在正交的频率上同时传送多路信号,能够充分的利用信道的带宽。
在OFDM系统中,每个传输符号速率的大小大约在几十bit/s到几十bit/s之间,必须进行串并转换,将输入的串行比特流转换成可以传输的OFDM符号。
因为调制模式可以自行转换,是可以自适应性调节的,所以每个子载波的调制模式可以变化,故串并变换需要分配给每个子载波数据段的长度也是不一样的。在接收端执行相反的过程,从各个子载波处传来的数据被转换回原始的串行数据。
当一个OFDM符号在多径无线信道中传输时,频率选择性衰落会导致某几组子载波受到相当大的衰减,从而引起比特错误,这些在信道频率响应上的零点会造成在邻近的子载波上发射的信息受到破坏,导致在每个信号中出现一连串的比特错误。与一大串错误连续出现的情况比较相比较,大多数前向纠错编码在错误分布均匀的情况下会工作得更有效。所以,为了提高系统的性能,大多数系统采用数据加扰作为串并转换工作的一部分。
在OFDM中,调制和解调是必不可少的。在调制过程中,有多路子载波,我们对子载波上的信号进行差分相位键控调制方式,简称PSK调制方式。其调制和解调原理如下:
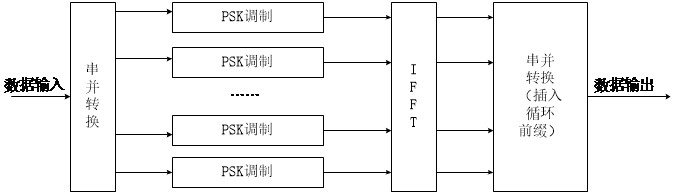
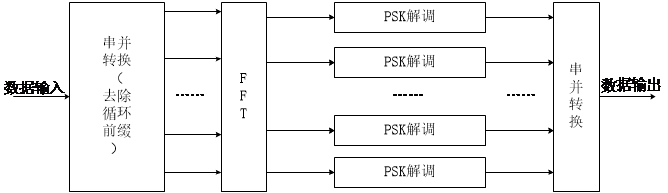
通过技术分析可以看出,OFDM的FFT把每个符号的信息分摊到N个时刻了,在时域上展宽,相当于时间分集的效果。符号间隔变大,是接收端检测的时候考虑N个采样时刻的一起处理,把它当做一个符号。符号间隔比时延大,就没有多径影响了。多径只有当时延比符号间隔长的时候才会有。
由于加上了CP的傅里叶变换,把普通卷积变成了循环卷积,这样多径导致拖尾的数据被循环到前面来了,只要多径时延不超过CP长度那么就是数据信息无丢失的。(不会丢失到下一个symbol 的含义)也就是不产生符号间干扰。
由于Anykey-AV8采用正交频分复用技术以及差错控制技术,平且载波数多达1024个,简单的理解是1024个普通的数传电台在同时发送数据和接收数据,其抗多径效应非常显著。非常适合在海面上这种多径干扰严重的环境使用。
无人艇的通信方式
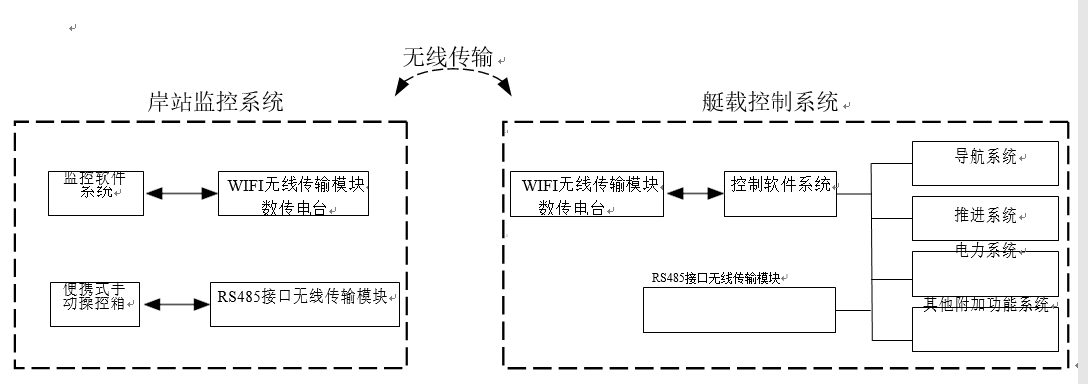
国内的很多舰艇已经大量采用工业以太网即TCP/IP技术,TCP/IP是Transmission Control Protocol/Internet Protocol的简写,中译名为传输控制协议/因特网互联协议,又名网络通讯协议,是Internet最基本的协议。由网络层的IP协议和传输层的TCP协议组成。TCP/IP 定义了电子设备如何连入因特网,以及数据如何在它们之间传输的标准。协议采用了4层的层级结构,每一层都呼叫它的下一层所提供的协议来完成自己的需求。通俗而言:TCP负责发现传输的问题,一有问题就发出信号,要求重新传输,直到所有数据安全正确地传输到目的地。而IP是给因特网的每一台联网设备规定一个地址。因为工业以太网技术成熟,有完整的校验机制,抗干扰能力强,技术通用性广,可以通过路由网关链接到不同的云平台。几乎各种总线协议都可以通过转换器转换成以太网。如CAN(Controller Area Network)总线、RS232/RS485,高清视频信号等都可以方便的转换成以太网。这样有利于集成船载的各种设备,以太网用于艇载信息综合处理系统与地面站综合监控系统、以及自主航行控制系统之问的通信。使用以太网发送控制命令以及无人艇的实时状态信息,实现对无人艇的远程访问、远程控制。而地面站综合监控系统和艇上信息综合处理系统分别作为无人艇地面和艇上监控系统的信息中心,在与地面站电子海图终端、地面站视频监控系统,艇载电子海图终端、自主航行控制系统等其他监控设备之间的通信也均采用的是以太网TCP协议。使用用以太网通信的系统有:
(1)地面站综合监控系统与艇载信息综合处理系统,进行控制命令和无人艇实时运动状态信息的传递。
(2)艇载信息综合监控系统与自主航行控制系统,通信内容包括运动轨迹、控制命令、无人艇实时运动状态。
(3)无人艇信息综合处理系统与艇上其他监控、导航设备,通信内容包括电子海图信息、雷达信息、视频监控信息,通信以图片信息为主。
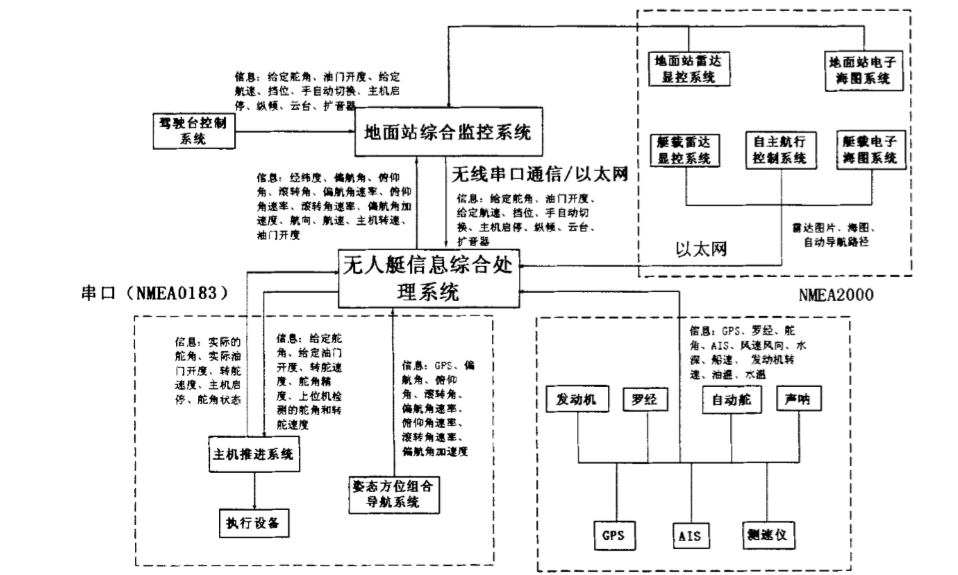
(4)地面站综合监控系统与地面站其他监控、导航设备,通信内容包括电子海图信息、雷达信息、视频监控信息,以图片信息为主。包括GPS/北斗、惯导系统、毫米波雷达、声纳,自动驾驶仪,激光雷达,视频等。其他的使用串口协议,最后通过RSS232转以太网,融合到以太网通信系统当中,串口通信简单快捷,一方面为无人艇信息综合处理系统提供实时的姿态、方位数据,另一方面将控制命令传达给主机推进系统等执行设备,同时将从该设备检测到的无人艇实时运动状态反馈给信息综合处理系统。数传电台主要以RS232/485接口为主,从接口以及通信协议上来讲,已经不适应现代无人艇通信数据链的要求。
无人艇信息网络及控制系统中使用串口通信的主要有三个部分:
(1)无人艇信息综合处理系统与姿态方位组合导航设备,姿态方位组合导航设备遵循的是NMEA0183协议,该协议基于RS232的串行通信标准,可以实现点对点,一点对多点的数据传输。所以使用的是有线的串口通信。
(2)无人艇信息综合处理系统与主机推进系统,主机推进系统由单片机进行控制,故使用有线串口与信息综合处理系统通信。
(3)无人艇信息综合处理系统与地面站综合监控系统,串口通信不是主要通信,主要用于一些不具备以太网通信接口的设备,最后这些数据转换为以太网通信接入到主通信系统中。
Anykey-AV8是IP内核,标准的以太网透传接口。可以方便的与无人艇控制平台对接。由于加入了实时视频传输技术,相对于以前的只是传输数据和控制指令,现在的无人艇通信对带宽的要求更高,以三路高清视频为例,采用1080P分辨率,H.264编码,每路最少需要6Mbps的速率,三路总共需要18Mbps,加上控制指令以及数据,所需要带宽在20Mbps,传统的数传电台根本无法达到这种带宽,Anykey-AV8提供了24Mbps的可用速率,可以满足需求,而Anykey AV8-MSC基站式设备,更是提供了高达100Mbps下行,50Mbps上行数据带宽,且支持点对多点的应用,延时<10ms,可以满足点对多点无人艇组网数据传输。